What is Long Baseline (LBL)?
Long Baseline (LBL) positioning is a high-accuracy underwater acoustic navigation method that determines the position of a subsea vehicle, diver, or structure by measuring distances to three or more fixed seabed transponders.
Because these reference points are mounted on the seabed rather than the surface vessel, LBL provides highly stable and depth-independent positioning accuracy — often reaching decimetre or centimetre levels in deep water.
In practical terms, LBL is a seabed-referenced acoustic positioning system designed for high-accuracy subsea navigation, construction support, and metrology.
Key Takeaways
- LBL positioning uses fixed seabed transponders as reference points, making accuracy independent of surface vessel movement.
- Because LBL reference points are mounted on the seabed rather than the surface vessel, it delivers highly stable and depth-independent positioning accuracy.
- LBL can achieve decimetre-level and, in some configurations, centimetre-level accuracy depending on baseline geometry, calibration quality, and sound velocity modelling.
- Unlike USBL, which references a moving surface vessel, LBL references fixed seabed points — reducing the impact of vessel motion, depth, and geometry on positioning accuracy.
- An LBL system requires deployment and calibration of seabed transponders before operations, making mobilisation typically longer than USBL systems.
- LBL is commonly selected for deep water construction, high-precision metrology, long-duration seabed projects, and environments where vessel motion affects surface-referenced positioning.
A complete LBL spread typically includes seabed transponders, vehicle or vessel transceivers, and integrated navigation software for calibration and positioning control.
Why Is GPS Not Reliable Underwater?
GPS signals cannot penetrate seawater. Once operations move below the surface, radio waves are rapidly absorbed, making satellite positioning unusable. Offshore survey, construction and inspection projects therefore rely on acoustic positioning systems, which use sound pulses to measure distance and compute position underwater.
Among these systems, LBL is widely regarded as the benchmark for high-accuracy subsea positioning — particularly for deep-water construction, metrology, and long-duration seabed projects.
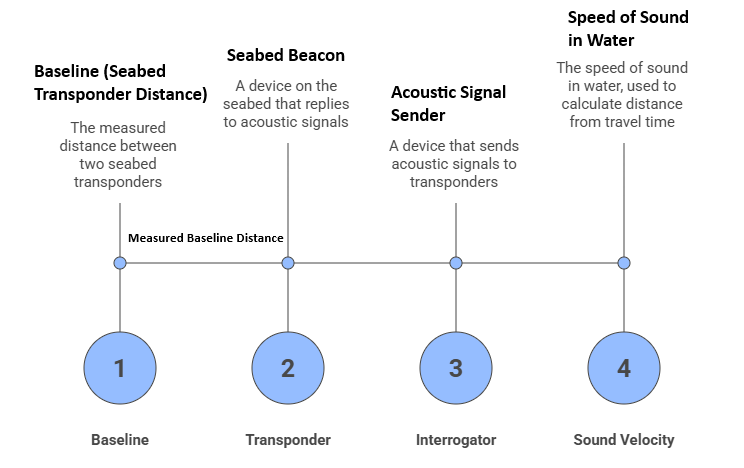
Key Terms in LBL
Baseline: Distance between seabed transponders
Transponder: Seabed beacon that replies to acoustic interrogation
Interrogator: Device that sends acoustic signals
Sound Velocity: Speed of sound in water used to convert travel time to distance
What Is Underwater Acoustic Positioning?
Before zooming in on LBL, it helps to understand the family it belongs to: underwater acoustic positioning. Because sound travels efficiently in water, acoustic systems send and receive sound pulses between transducers, transponders and receivers to measure ranges and then compute positions.
Two primary acoustic positioning methods are most commonly used offshore:
USBL – Ultra-Short Baseline: A compact transducer array on the vessel’s hull measures both range and bearing to a subsea transponder. Easy to deploy and very flexible but accuracy depends heavily on vessel motion sensors and local conditions.
LBL – Long Baseline: An array of seabed-mounted transponders is deployed around the worksite. A vehicle, diver or structure interrogator measures range to three or more of these seabed beacons and computes its position by triangulation.
Where USBL and SBL reference the surface vessel, LBL references fixed points on the seabed. This is the key reason why LBL delivers such high, depth-independent accuracy.
How Does Long Baseline (LBL) Positioning Work?
At its core, a Long Baseline system is just a carefully calibrated network of subsea reference points:
- Deploy seabed transponders
- Robust acoustic transponders are placed on or near the seabed around the worksite – typically along the “corners” of the operational area or around key structures.
- Baselines (the distances between these transponders) usually range from tens of metres up to 2 km or more, depending on the site and required accuracy.
- Calibrate the baseline network
- The relative positions of the transponders are surveyed and solved so that the network becomes a known, geo-referenced frame in which everything else can be positioned.
- Calibration often uses dedicated LBL software (e.g. Sonardyne Fusion 2) that fuses acoustic ranges with GNSS, motion sensors and sound-velocity data.
- Measure Acoustic Ranges
- A mobile interrogator (mounted on an ROV, AUV, towfish, diver, or on the vessel via a dunker) sends acoustic signals to the transponders.
- Each transponder replies, and the travel time (two-way) is converted to range using the local speed of sound in water.
- Compute Position by Triangulation
- With ranges to three or more transponders, the system solves for position using triangulation or least-squares algorithms, often aided by depth from a pressure sensor. LBL accuracy depends mainly on transponder geometry, calibration quality, and correct sound velocity inputs (SVP/CTD).
Because the seabed array remains fixed, LBL position stability is largely independent of water depth and significantly less affected by vessel motion — a major advantage over surface-referenced systems such as USBL.
What Are the Key Components of an LBL System?
A practical offshore LBL spread typically includes:
- Seabed transponders
- Examples from the Unique Group portfolio include Sonardyne Compatt 6/6+ and Midi Compatt 6, which are full-featured LBL/USBL transponders and acoustic modems.
- Vehicle or vessel transceivers
- ROV-mounted units such as Sonardyne ROVNav 6 provide LBL ranging and telemetry from work-class ROVs.
- Dunking transceivers such as Sonardyne Dunker 6 are designed for over-the-side deployment from a surface vessel, avoiding permanent hull installations.
- Navigation & control software
- Solutions like Sonardyne Fusion 2 integrate LBL, INS and other sensors into a single project-wide positioning solution for survey and construction projects.
This ecosystem reflects what is required to build and manage a complete LBL network offshore — not just transponders, but the wider toolkit needed for calibration, telemetry, and integrated positioning.
When Should You Choose LBL Positioning?
- Deep water construction
- High-precision metrology
- Long-duration seabed projects
- Environments where vessel motion affects accuracy
- Projects requiring repeatable positioning over extended periods
Typical LBL applications
LBL is generally chosen when positional accuracy, repeatability, and independence from the surface vessel matter more than rapid mobilisation, particularly in deep-water construction and metrology projects.. Some common use cases include:
- ROV and AUV navigation for detailed seabed mapping or inspection
- Structure installation (templates, manifolds, jackets, suction piles)
- Pipeline and cable lay – monitoring touchdown point and route
- Spoolpiece metrology and as-built surveys
- Dynamic positioning (DP) reference in deep water
- Long-term observatory arrays and seabed monitoring networks
- UXO (unexploded ordnance) clearance along planned routes
For high-precision subsea construction and survey operations where stability and repeatability are critical, LBL remains one of the most robust acoustic positioning solutions available.
Below are some of the most common technical questions engineers and project managers ask about Long Baseline positioning.
Frequently Asked Questions About Long Baseline (LBL) Positioning
What does LBL stand for?
LBL stands for Long Baseline, referring to the relatively long distances between seabed-mounted acoustic transponders used as positioning references.
How accurate is LBL positioning?
LBL systems can achieve decimetre-level and, in some configurations, centimetre-level accuracy depending on baseline geometry, calibration quality, and sound velocity modelling.
What is the difference between LBL and USBL?
LBL uses fixed seabed reference points, while USBL references a moving surface vessel. Because USBL is surface-referenced, its accuracy can be affected by vessel motion, depth, and geometry. For a deeper technical breakdown of where USBL accuracy can degrade, see our guide on the limitations of USBL systems.
Can LBL be used in deep water?
Yes. LBL performance is largely independent of depth because its reference network is mounted on the seabed rather than at the surface.
How long does LBL mobilisation take?
Mobilisation time depends on seabed depth and number of transponders, but deployment and calibration typically require more time than USBL systems.



")



















