QPS Qinsy: Survey Planning, Acquisition and Processing Software
Qinsy is a survey planning, acquisition, and real-time hydrographic data processing solution, supporting a wide variety of industries, from simple single beam surveys to complex offshore construction works.
Qinsy is a survey planning, acquisition, and real-time hydrographic data processing solution, supporting a wide variety of industries, from simple single beam surveys to complex offshore construction works.
Features
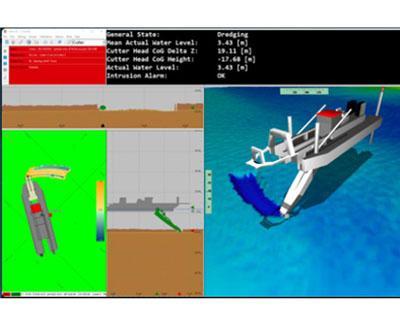
Precisely track the position of multiple defined objects in support of dredging and marine construction applications.
Acquire data from multiple sensors simultaneously.
Singlebeam, multibeam, laser, side scan sonar, magnetometer, seismic support, and sub bottom profiling.
Setup applications, object configuration, monitoring, visualisation, safety precautions, and reporting tools for dredging.
Datum transformation and geoid model support, EPSG database, and predefined transformations.
Specifications
| Availability |
|---|
Multiple inputs (e.g. GPS, INS, tide, USBL, draft, etc.) for real-time positioning in 3D. Can be used in a Kalman filter.
View processed point clouds, bathymetric grids, and side scan sonar mosaic during their acquisition, for optimal qa/qc and “at-the-dock” product delivery.
Navigation display (layers:ENC, DXF/DWG, Geotiff ECW) multibeam displays, Numerics, profile display, and 3D displays.
Autonomous vessel support with mission planning, intelligent auto-line generation, and remote display and control.
Line planning, grid operations, volume calculations, plotting, and many more tools in support of all phases of survey.
Applications
Hydrographic and Oceanographic Surveys
Complete offshore construction and survey applications
Barge, tug and fleet management
Dredging monitoring and navigation
Electronic navigation chart production